|
I am a first year PhD student in Data Science at City University of Hong Kong (CityU), advised by Prof. Ning Miao. Before that, I earned my BEng degree at Southern University of Science and Technology (SUSTech) majoring in Computer Science. From August 2023 to March 2024, I worked as a research assistant at Peking University (PKU) under the supervision of Prof. Haoran Zhang. I was also a research internship student at the University of Illinois Urbana-Champaign (UIUC), where I was advised by Prof. Bo Li. My research interests focus on LLM reasoning, and I am currently diving into agent tool use benchmarking. Email / CV / Google Scholar / Github |

|
|
|
|
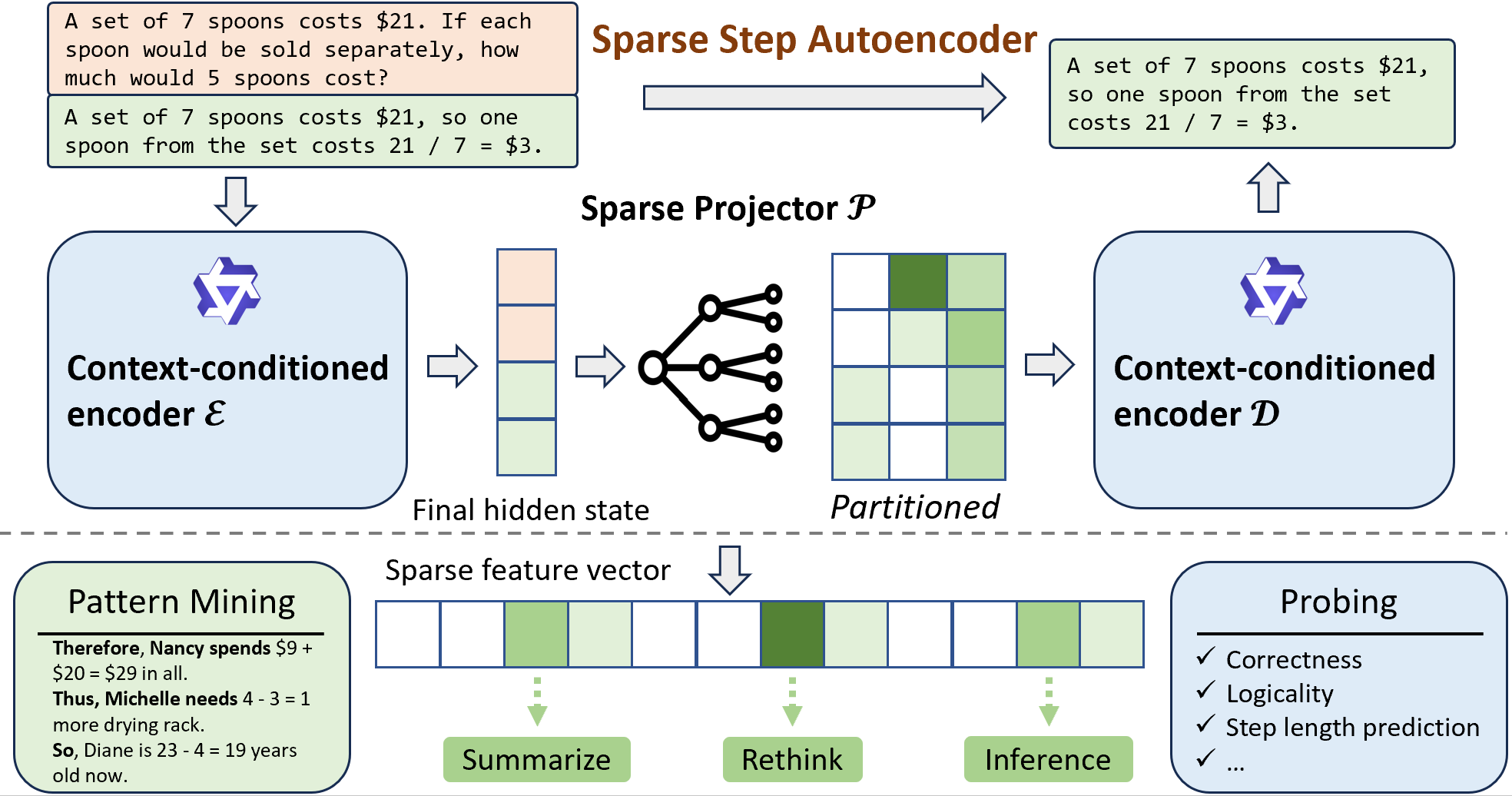
Xuan Yang*, Jiayu Liu*, Yuhang Lai*, Hao Xu, Zhenya Huang, Ning Miao ICML, 2026 |
|
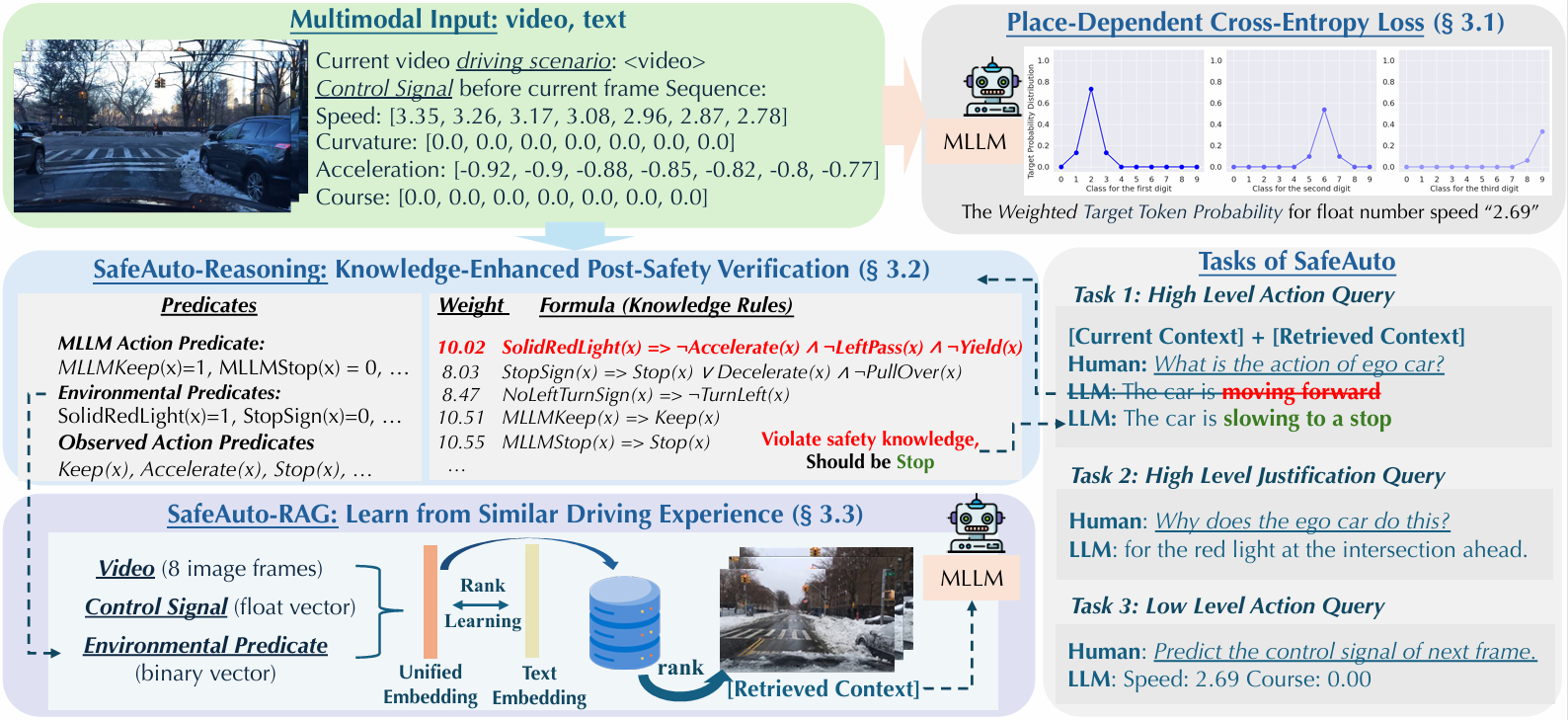
Jiawei Zhang, Xuan Yang, Taiqi Wang, Yu Yao, Aleksandr Petiushko, Bo Li. ICML, 2025 |